|
Доклад: Использование нечёткой логики в системах автоматического управленияДоклад: Использование нечёткой логики в системах автоматического управленияУральская государственная горно-геологическая академия Горно-механический факультет Кафедра автоматики и компьютерных технологийДОКЛАДНа тему:Алгоритмы управления процессом флотации с использованием аппарата нечеткой логики
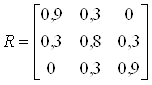
Разработал студент Гладких В.С. Группа АГП-97-2 г. Екатеринбург 2001 г. Использование нечёткой логики в системах автоматического управленияСовременный уровень развития промышленности требует комплексного подхода при разработке САУ техническими объектами. Это обусловлено, с одной стороны, необходимостью повышения качества управления при минимальных затратах на создание и эксплуатацию систем, с другой стороны – усложнением структуры объекта управления, функций, выполняемых им, и, как следствие, увеличением факторов неопределённости, которые необходимо учитывать для управления объектом. В теории автоматического управления существует достаточно много методов, позволяющих оптимизировать работу систем по тем или иным критериям качества при выполнении ряда ограничений. Математический аппарат, используемый в традиционных методах автоматического управления, не всегда в полной мере может удовлетворить нуждам современного производства. Поэтому в последнее время находят широкое распространение так называемые “мягкие вычисления”, основной принцип которых заключается в обеспечении приемлемого (не обязательно оптимального) качества управления в условиях неопределённости при относительно невысоком уровне затрачиваемых ресурсов (стоимостных, временных, вычислительных и т. п.). К мягким вычислениям в настоящее время относят такие информационные технологии, как экспертные системы, нейронные сети, нечеткие системы, генетические алгоритмы и ряд других. В их основе лежит попытка некоторой формализации деятельности головного мозга человека и функционирования живых организмов. Рассмотрим ряд аспектов использования нечеткой логики при управлении ТО (техническими объектами). Построение нечетких систем основано на имитации действия человека-оператора или ЛПР при помощи ЭВМ. Действительно, человеку свойственно оперировать не количественными показателями, а качественными, но следует учитывать, что эти качественные понятия носят, по сути, нечёткий характер. При этом используются лингвистические переменные, описывающие входную ситуацию и управляющие воздействия на качественном уровне [1] (например, «Расход ксантогената» - «Немного уменьшить», «Температура» - «Средняя», «Уровень пульпы» - «Не изменять»). Эти лингвистические переменные задаются на некоторой количественной шкале, при помощи которой определяются степени соответствия данных рассматриваемым понятиям. Для этого используются функции принадлежности, принимающие значения от 0 до 1. Возможные значения лингвистических переменных называются термами (например, для лингвистической переменной – «Уровень пульпы» термами являются «Понизить», «Повысить», «Не изменять»). Кроме того, задается набор правил, ставящих в соответствие входной ситуации определённое управляющее воздействие. Эти правила обычно имеют вид «Если …, то…» и формируются при помощи эксперта или группы экспертов. Однако во многих случаях экспертам не удаётся принять однозначное решение о требуемом воздействии на объект при сложившейся ситуации. Например, если рассогласование между уставкой и выходом объекта отрицательно, а его производная положительна, даже опытному специалисту бывает затруднительно ответить, каким должно быть управляющее воздействие. Поэтому представляется целесообразным каждому правилу «Если …, то…» также ставить в соответствие некоторую величину из интервала от 0 до 1, отражающую степень уверенности в предпринимаемых действиях. Таким образом, формируется нечеткое соответствие между пространством предпосылок и пространством заключений [2]. После описанных процедур, выполняемых экспертами, вступает в действие механизм нечеткого логического вывода, в ходе которого осуществляется композиция нечеткого множества [3]. Композицию можно представить как аналог умножения вектор-строки на матрицу, только вместо операции умножения используется расширенное представление логической операции И, а вместо операции сложения – расширенное ИЛИ. В результате определяется нечёткое множество управляющих воздействий. Последним этапом алгоритма нечеткого управления является дефаззификация (от англ. слова «Fuzzy» «нечеткий») – процесс перевода нечетких данных в конкретные физические управляющие величины. Обычно в качестве расширений операций И и ИЛИ выбирают операции взятия минимума и максимума соответственно, т.е. используют максминный логический базис. Однако существуют и другие точки зрения относительно выбора логического базиса. Вообще тот или иной логический базис задается априори. Наиболее распространенными являются максминный, алгебраический и ограниченный базисы. Как было сказано выше, нечёткое соответствие отражает степень уверенности ЛПР, выполняющего данное действие в сложившейся ситуации. График нечеткого соответствия может быть представлен в виде матрицы. Так, например, если входная Х и выходная Y переменные имеют одинаковые терм-множества Тх = Ту ={«Отрицательно», «Около нуля», «Положительно»}, а график нечеткого соответствия имеет вид:
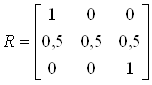
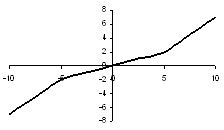
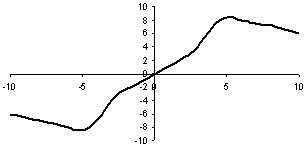
то система правил нечеткого вывода имеет следующий вид: - если Х «Отрицательно», то Y «Отрицательно» со степенью уверенности 0,9, «Около нуля» - со степенью уверенности 0,3; - если Х «Около нуля», то Y «Отрицательно» со степенью уверенности 0,3, «Около нуля» со степенью уверенности 0,8 , «Положительно» со степенью уверенности 0,3; - если Х «Положительно», то Y «Около нуля» со степенью уверенности 0,3, «Положительно» со степенью уверенности 0,9. Фактически механизм нечеткого логического вывода представляет некоторое нелинейное преобразование. В качестве иллюстрации различий в статических характеристиках нечеткого регулятора при выборе различных логических базисов для одномерного случая рассмотрим зависимости, изображенные на рисунках 1…3 приложения А. График нечеткого соответствия имеет вид
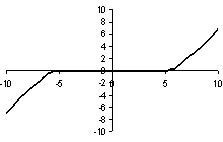
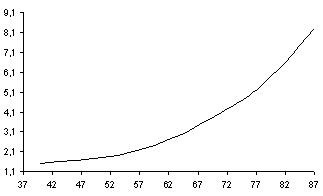
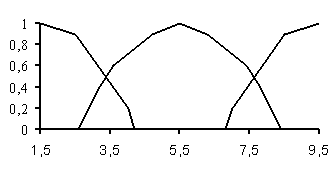
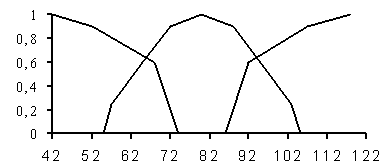
Такой график нечеткого соответствия означает, что эксперт, чьи знания были использованы при построении НР, мог выразить свою мысль следующим образом: «Я уверен, что, если Х положительно, то Y должно быть положительно и, если Х отрицательно, то Y должно быть отрицательно, но если Х близко к нулю, то Y может быть как близким к нулю, так и отрицательным, так и положительным – наверно, это зависит от дополнительных неучтенных условий (например, от производной Х по времени)». Приведенные примеры достаточно наглядно демонстрируют различия свойств НР при выборе того или иного логического базиса. Так, например, алгебраический базис обеспечивает более линейную статическую характеристику. С одной стороны, это свойство является положительным, поскольку разработчику систем управления всегда удобней иметь дело с линейными характеристиками. С другой стороны, линейную зависимость легко реализовать, не прибегая к нечёткой логике. Иными словами, если разработчик системы управления считает, что зависимость между входом и выходом системы должна быть близка к линейной и настаивает на том, что система должна строится на основе теории нечетких множеств, то можно порекомендовать ему использовать именно алгебраический базис. Максминный базис генерирует характеристику, которую можно аппроксимировать типовой нелинейностью «зона нечувствительности + насыщение». Подобная характеристика является достаточно надежной, поскольку «насыщение» не дает системе идти в разнос, ограничивая неустойчивый режим автоколебаниями, а «нечувствительность» стабилизирует систему в режиме, близком к установившемуся. Такой вид характеристики в полной мере удовлетворяет концепции мягких вычислений. Наиболее интересным является ограниченный базис, поскольку изменение графика нечеткого соответствия в этом случае может качественно повлиять на характеристики системы. Наглядным примером тому служит зависимость, изображённая на рис. 3. Как видно из этого рисунка, статическая характеристика имеет два участка, где коэффициент передачи отрицателен, т. е. при попадании на эти участки система теряет устойчивость (несмотря на то, что все промежуточные операции на первый взгляд кажутся монотонными). Как показал анализ эта немонотонность обусловлена способом дефаззификации. Таким образом, целесообразно при построении нечётких систем управления пользоваться не только знаниями эксперта, но также базовыми понятиями теории автоматического управления. Дать общие рекомендации относительно выбора того или иного базиса не представляется возможным – все зависит от специфики управляемого объекта. Анализ работы нечетких САУ позволил выявить следующие основные факторы, влияющие на качество управления: - количество термов входных и выходных переменных; - вид функций принадлежности нечетких переменных, составляющих терм-множества лингвистических переменных; - характер нечеткого соответствия между пространством предпосылок и пространством заключений; - способ дефаззификации; - выбор логического базиса. Следует заметить, что во многих публикациях на основании ограниченных экспериментальных данных делается вывод о том, что нечеткие алгоритмы обеспечивают более высокую эффективность по сравнению с классическими. Это далеко не всегда справедливо. В каждом конкретном случае необходимо сопоставлять требуемое качество управления с располагаемыми ресурсами. Появление теории нечетких множеств и алгоритмов управления на е основе обусловлено, в первую очередь, появлением задач, для решения которых традиционного математического аппарата просто не существует. Эффективность использования мягких вычислений весьма высока. Об этом можно судить по многочисленным публикациям, посвященным данной теме. Однако эта эффективность заметно возрастает, если наряду с мягкими вычислениями применять традиционные методы теории автоматического управления, опробованные в течение десятилетий и имеющие под собой достаточно жесткую математическую основу. Нечеткая логика в соединении с ПИД регулированиемДля управления дискретными событиями обычно служит многоступенчатая логика, реализованная на программируемых логических контроллерах (ПЛК). Для непрерывного управления применяют релейные (двухпозиционные) или ПИД-регуляторы. Последние работают хорошо, когда управляемый объект находится в устойчивом режиме. В ситуациях же сильных помех, изменения параметров во времени или наличия запаздывания традиционные регуляторы могут не справиться со своей задачей, поскольку исходное для них предположение о линейности объекта уже не действует. В подобных случаях замена (дополнение) ПИД-регуляторов регуляторами на нечеткой логике часто оказывается более удобной, чем использование привычных, но усложненных регуляторов состояния или применение адаптивного подхода. Это, однако, не единственная область, где находят применение решения, базирующиеся на нечеткой логике. Её основной потенциал в области промышленной автоматизации реализуется в возможностях непосредственного конструирования многосвязных регуляторов. Обычно с регулированием одной переменной вполне справляется релейный или ПИД-регулятор. Однако установки для множества одноконтурных регуляторов приходится задавать вручную. Операторы анализируют условия функционирования объекта и задают установки регулятору в целях его оптимизации. Этот процесс называется диспетчерским управлением и охватывает множество переменных. К сожалению, релейные и ПИД-регуляторы имеют дело лишь с одной переменной, поэтому необходимо множество независимых контуров управления, которые не могут «общаться» друг с другом. В тех случаях, когда необходимо учитывать взаимосвязь физических величин (параметров объекта), приходится строить полную математическую модель (ММ) объекта, позволяющую найти решение. В промышленной автоматизации этому препятствует длительность разработки ММ, необходимость введения специальных настроечных параметров для последующей оптимизации регулятора из-за существенных упрощений при построении большинства ММ и сложность настройки этих параметров (поскольку оптимизация объекта в одном режиме работы нередко ухудшает её работу в других режимах). Кроме того, большинство специалистов не имеют достаточной подготовки для построения строгой ММ. В итоге релейный и ПИД-регулятор управляет отдельной переменной объекта, а операторы осуществляют диспетчерское управление. Нечеткая логика предоставляет высокоэффективное решение этой проблемы. Она позволяет разрабатывать многосвязные регуляторы с диспетчерскими функциями не по ММ, а на основании экспериментальных данных и опыта операторов. Такое решение характерно для случаев, подобных, например, регулированию нескольких температурных зон в печи или управлению дозированием флотационных реагентов. Промышленное применение нечеткой логики началось в 80 – х годах, прежде всего в Европе и Японии. Когда выяснилось, что достоинства нечеткой логики можно использовать в полной мере лишь в сочетании с традиционными способами регулирования, начался выпуск продуктов, интегрирующих технологии нечеткой логики в аппаратуру и программное обеспечение промышленной автоматизации. В 1990 г. японская фирма Omron разработала микропроцессор на нечеткой логике и реализовала его в виде сопроцессорного модуля для своих ПЛК. В 1992 г. корпорация Klockner-Moeller (Австрия) разработала специализированный «нечеткий ПЛК», сочетающий нечеткую логику и обычные методы автоматизации как в самом ПЛК, так и в соответствующем программном обеспечении. В 1994 г. компании Allen-Breadley (США) и Siemens (Германия) разработали полностью программные реализации ПЛК в виде функциональных блоков. В 1997 г. Международная электротехническая комиссия разработала стандарт нечеткой логики CD IEC 1131-7 с целью объединить её с существующим стандартом IEC 1131 для ПЛК. Производители следуют этому направлению и широко интегрируют компоненты на нечеткой логике в АСУТП. Таким образом, разработчики большинства промышленных систем управления сегодня вполне обеспечены средствами нечеткой логики. В качестве примера успешного применения контроллера на нечеткой логике можно привести систему стабилизации температуры горения на мусоросжигательных заводах в Мангейме. При использовании стандартных регуляторов производительность паровых котлов колебалась в пределах ±35 % от номинальной. Внедрение контроллера на нечеткой логике позволило на порядок уменьшить эту величину. В результате существенно повысилась управляемость процесса и снизились вредные выбросы в атмосферу, в частности, оксида углерода в 2 раза. Еще один пример практического применения НЛ – очистка стоков. Процесс включает в себя комбинацию биологических, химических и механических факторов и практически не поддается математическому моделированию. Однако имеется большой опыт операторов, который можно реализовать с использованием нечеткой логики. Основной переменной, характеризующей качество процесса, является содержание ионов тяжелых металлов в стоках на выходе из аппарата очистки. Существующие средства измерения концентраций ионов тяжелых металлов сложны и дороги в эксплуатации, не обеспечивают необходимые для управления процессом точность и частоту измерения. Кроме того, малые изменения входных переменных процесса могут резко изменить показатели выходных переменных. Поэтому следует определить некий показатель, характеризующий качество очистки стоков, либо содержание ионов тяжелых металлов в них. Как показали экспериментальные исследования, переменными, определяющими качество протекания процесса очистки, являются значения водородного показателя рН и окислительно-восстановительного потенциала стоков еН, измеряемые на входе и выходе из аппарата очистки. Однако каждая измеряемая переменная рН и еН в отдельности не дает четкой и достоверной информации о содержании ионов тяжелых металлов в стоках. Поэтому появилась необходимость синтезировать на основе этих двух величин косвенный показатель качества очистки промышленных стоков, используемый в роли индикатора при управлении процессом. Исследования позволили выявить как косвенный показатель величину произведения рН и еН [4]. Используя аппарат НЛ, был составлен алгоритм управления процессом очистки стоков. Структуру схемы управления можно представить следующим образом. Измеряемые на выходе из аппарата очистки величины рН и еН поступают на вход контроллера на нечеткой логике в блок вычисления косвенного показателя Y. Контроллер, используя 207 правил, рассчитывает и задает уставки стандартному ПИД-регулятору расхода стоков, поступающих на очистку. Этот ПИД регулятор является функциональным блоком нечеткого ПЛК. Проект был реализован в течение 3 месяцев и окупился за полгода. Использование нечеткой логики в алгоритмах управления процессом флотацииПроцесс флотации характеризуется, с одной стороны, достаточной сложностью и многообразием протекающих во флотомашине взаимосвязанных химических и физико-механических процессов, с другой стороны, - отсутствием возможности на многих обогатительных фабриках непрерывного оперативного контроля за рядом важнейших технологических параметров. Поэтому термин «недостаточная информация при управлении» является синонимом понятия нечеткая логика. Действительно, весьма трудно составить более или менее полную ММ процесса флотации в условиях взаимного влияния многих факторов (например, взаимодействие различных типов флотационных реагентов, наличие внутренних технологических обратных связей). Кроме этого коэффициенты уравнений модели переменны, т.к. статические и динамические свойства процесса изменяются во времени под воздействием помех (изменение характеристик флотомашин и межремонтные промежутки времени; сезонные колебания ионного состава и температуры воды; изменение свойств реагентов в зависимости от срока и хранения). Применение алгоритмов управления, основанных на нечеткой логике, позволяет существенно сократить время введения САУ в эксплуатацию на фабриках, подлежащих модернизации, а также уменьшить капитальные затраты на средства автоматизации. В качестве примера предлагаю рассмотреть систему автоматического управления дозированием ксантогената в процесс медной флотации на Красноуральской обогатительной фабрике. Стоит отметить, что расход реагентов – эффективное дорогостоящее регулирующее воздействие процесса флотации. От правильно выбранного расхода реагента зависят конечные результаты флотации, а перерасход реагентов сказывается неблагоприятно на технико-экономических показателях работы фабрики. Автоматизация процесса подачи реагента позволяет значительно сократить его расход, а также должна служить тому, чтобы более точно следовать режимным технологическим картам, предъявляющим жесткие требования к соблюдению постоянства соотношения «возмущающее воздействие – расход реагента»[5]. Однако довольно часто решения по коррекции количества подаваемого реагента принимаются оператором технологом на основе личного опыта и носят, по сути, интуитивный характер. Применение аппарата нечеткой логики позволит моделировать механизм принятия решения оператором, используя его опыт в полной мере, и, следовательно, более эффективно автоматизировать процесс подачи реагентов и флотации в целом. Главной задачей управления процессом подачи реагентов является максимальное извлечение ценного металла в концентрат. Содержание ксантогената во флотационной пульпе колеблется от 0,5 – 1 мг/л до 15 - 20 мг/л. Для многих условий оптимальной считается вполне определенная концентрация ксантогената в пульпе. Между расходом ксантогената и его концентрацией прослеживается четкая зависимость (рис.4)[6]. Для условий Красноуральской обогатительной фабрики экспериментально установлена оптимальная концентрация ксантогената со значением 5,5 мг/л. При снижении концентрации увеличивается содержание меди в хвостах, а увеличение приводит к необходимости осуществления дополнительных мероприятий по очистке сточных вод ОФ. Дозирование ксантогената осуществляется комбинированной САУ по расходу твердого Qт на входе с корректировкой по концентрации ионов ксантогената в пульпе. Однако непосредственное оперативное измерение концентрации ксантогената на должном уровне осуществить невозможно вследствие того, что относительная погрешность средств измерения концентрации составляет 10%. Благодаря тому, что существует нелинейная зависимость между расходом ксантогената и его концентрацией и, используя знания экспертов, можно применить аппарат нечеткой логики. Следует уточнить, что задачей корректирующего контура является сообщение основному контуру относительного расхода реагента. Концентрационное состояние флотомашины будет характеризоваться лингвистической переменной «Концентрационный режим», которая в зависимости от значения концентрации ксантогената в пульпе может принимать три вербальных значения, т.е. термы: «Недопитка» (НП), «Нормальный режим» (НР), «Перепитка» (ПП). Использовать большое число значений, например дополнительную нечеткую переменную «Сильная перепитка», нецелесообразно, т.к. для ЛПР это, вероятно, будет эквивалентно в данных условиях термину «ПП», что внесет лишь дополнительную неопределённость на стадии экспертного опроса. Непрерывные кусочно-линейные функции принадлежности нечетких множеств «НП» СНП, «Н» СН и «ПП» СПП, построенные на интервале 1,5…9,5 мг/л, представлены на рисунке 5. Возможные управляющие решения по количеству подаваемого в процесс ксантогената ограничены в зависимости от конкретной ситуации тремя управляющими воздействиями из терм-множества RК «Расход ксантогената»: «Уменьшить подачу (УМ)», «Не изменять (НИ)», «Увеличить подачу (УВ)». Непрерывные кусочно-линейные аппроксимированные функции принадлежности нечётких множеств, задающих на абсолютной оси значения управляющих решений, изображены на рисунке 6. Диапазон изменения относительного расхода ксантогената ограничен интервалом 42…118 г/т. Максимальное значение функции принадлежности нечёткого множества «НИ» достигается на отметке 80 г/т. Для каждого терма «УМ», «НИ», «УВ» лингвистической переменной «Расход ксантогената» соответственно определены матрицы МУМ, МНИ и МУВ, описывающие силу воздействия соответствующих управляющих решений (рисунок 7, а…в). Например, на рисунке 7, в изображена матрица МУВ, характеризующая управляющее решение «УВ». Из анализа матрицы видно, что если объект управления имел значение «НП», то в результате управляющего воздействия он со степенью уверенности 0,2 будет иметь прежнее значение, со степенью 0,8 значение «Н» и со степенью уверенности 0,4 – «ПП». Ситуация, в которую желательно перевести объект, т. е. целевая ситуация, определяется исходя из анализа степеней предпочтения управляющих решений. Степени предпочтения последних зависят от конкретной ситуации и задаются как продукционная система (набор правил) «ситуация – предпочтение решений». На основании экспертного опроса составляется следующая система: 1) если лингвистическая переменная имеет значение «НП», то степени предпочтения управляющих решений составляют: a (УМ) = 0; a (НИ) = 0,5; a (УВ) = 1; 2) если значение лингвистической переменной «Н», то a (УМ) = 0,4; a (НИ) = 1; a (УВ) = 0,4; 3) если лингвистическая переменная имеет значение «ПП», то a (УМ) = 1; a (НИ) = 0,2; a (УВ) = 0. При этом степень предпочтения каждого вида управляющего решения в конкретной ситуации определяется как конъюнкция степени применения того или иного правила и заданных в них степеней предпочтения управляющих решений. Результирующие степени предпочтения применения управляющих решений принимаются равными максимальным среди соответствующих степеней предпочтения по каждому значению признаков «УМ», «НИ», «УВ». Рассмотрим процедуру поиска управляющего решения на основе алгоритмов нечеткого ситуационного вывода[2]. По рисунку 5 идентифицируем текущую ситуацию, в которой находится объект. Например, имеет место ситуация s0 = {á0,6/НПñ,á0,4/Нñ}. 1) Определяем степени предпочтения каждого управляющего решения «УМ», «НИ», «УВ». Они соответственно равны a (R1,s0) = 0,4; a (R2,s0) = 0,5; a (R3,s0) = 0,6. Выбираем управляющее решение R3 «УВ» как имеющее наибольшую степень предпочтения. 2) Моделируем принятие выбранного управляющего решения R3. Для этого выполняется композиция нечетких значений признаков в ситуации s0 и нечетких отношений, задающих силу воздействия управления R3 (рисунок 7, в). В результате получаем ситуацию s03 = {á0,2/НПñ,á0,6/Нñ, á0,4/ППñ}. 3) Находим величину требуемого управляющего воздействия. Сначала определяем нечеткое отношение М, для этого вычисляем декартово произведение s0 ´ s03 и строим матрицу нечетких управляющих решений, которая представлена на рисунке 8. 4) Раскладываем полученное управляющее решение в базисе {«УМ», «НИ», «УВ»}. Для этого необходимо определить нечеткое множество RJ = {áμR(УМ)/ УМ ñ,áμR(НИ)/ НИ ñ,áμR(УВ)/ УВñ}. Для определения коэффициентов μR(УМ), μR(НИ), μR(УВ) следует вычислить степени включения отношения М в отношения МУМ , МНИ, МУВ. Управляющее решение в нечетком виде выглядит следующим образом: RJ = {á0,4/ УМ ñ,á0,4/ НИ ñ,á0,6/ УВñ}. 5) Проводим дефаззификацию - определяем количественное значение управляющего решения. Для этого необходимо построить объединение конъюнкций нечетких множеств, задающих термы «УМ», «НИ», «УВ», со степенями принадлежности этих термов нечеткому множеству RJ и найти центр площади полученной фигуры (рисунок 6), т.е. применить метод «центральной точки». Верхняя огибающая, соответствующая объединению полученных множеств, показана пунктирной линией. Перпендикуляр, построенный в точке 86 г/т, делит площадь фигуры пополам. Это означает, что значение 86 г/т является количественным выражением нечеткого управляющего решения. Следовательно, при возникновении рассмотренной в примере нечеткой ситуации, надо увеличить относительный расход ксантогената до 86 г/т. Техническая реализация данной системы дозирования ксантогената может быть осуществлена с помощью микропроцессорного программируемого контроллера Omron C 200 H с блочно-модульной архитектурой. Корректирующий контур реализуется в модуле нечеткой логики, который выдает сигнал, пропорциональный величине относительного расхода, в модуль ПИД – регулирования, где и формируется управляющее воздействие для дозатора ксантогената. ЗаключениеМожно сделать следующий вывод: ключ к успешному внедрению нечеткой логики в промышленную автоматизацию – в умелом сочетании её с традиционными средствами. Нечеткая логика не заменяет обычной техники управления, а дополняет е высокоэффективной методологией реализации стратегий многосвязного управления. Таким образом, основной потенциал нечеткой логики лежит в сфере реализации функций диспетчерского управления. Список литературы 1. Заде Л. Понятие лингвистической переменной и его применение к принятию приближенных решений. М.: Мир,1976. 2. Мелихов А.Н., Бернштейн Л.С., Коровин С. Я. Нечеткие. Ситуационные советующие системы с нечеткой логикой. М.: Наука, 1990. 3. Нечеткие множества и теория возможностей. Последние достижения: Пер. с англ./ Под ред. Р. Р. Ягера. М.: Радио и связь, 1986. 4. Топчаев В. П. Шапировский М. Р. Гульдин В. И. Оптимальное управление процессом очистки стоков промышленных предприятий методом гальванокоагуляции // Цветные металлы. 1995. № 9. 5. Троп А. Е., Козин В. З., Прокофьев Е. В. Автоматическое управление технологическими процессами обогатительных фабрик: Учебник для вузов. – 2-е изд., перераб. и доп. – М.: Недра, 1986. 6. Троп А. Е., Козин В. З., Аршинский В. М. Автоматизация обогатительных фабрик. М.: Недра, 1970. ПРИЛОЖЕНИЕ А
Рисунок 3 – Ограниченный логический базис. Рисунок 4 – Зависимость между расходом и концентрацией ксантогената. Рисунок 5 - Функции принадлежности нечетких множеств СНП, СН, СПП
Рисунок 6 - Функции принадлежности нечетких множеств «УМ», «НИ», «УВ» а) МУМ =
б) МНИ =
в )
МУВ = Рисунок 7 - Матрицы нечетких управляющих решений.
М = Рисунок 8 - Матрица нечетких управляющих решений. |
 ,
,
|
|
| 17.06.2012 |
| Большое обновление Большой Научной Библиотеки |
| 12.06.2012 |
| Конкурс в самом разгаре не пропустите Новости |
| 08.06.2012 |
| Мы проводим опрос, а также небольшой конкурс |
| 05.06.2012 |
| Сена дизайна и структуры сайта научной библиотеки |
| 04.06.2012 |
| Переезд на новый хостинг |
| 30.05.2012 |
| Работа над улучшением структуры сайта научной библиотеки |
| 27.05.2012 |
| Работа над новым дизайном сайта библиотеки |